関節の柔らかさに注目した人の動作の解析
【寄稿】理工学研究科(工学野)助教 矢木 啓介
 Text by 矢木 啓介(理工学研究科(工学野)助教)
Text by 矢木 啓介(理工学研究科(工学野)助教)
YAGI Keisuke/1988年生まれ。2016年筑波大学システム情報工学研究科修了 博士(工学)。筑波大学システム情報系研究員を経て、2018年4月より現職。中学生の時に始めたジャグリングが趣味。学生時代はパフォーマンス活動をアルバイト代わりにしていた。バルーンアートも得意。
人の何気ない動作を科学する
私たちは手首や足首を目に見える形で動かすこともできますし、動かさずに力を入れて固くしたり、また力を抜いて柔らかくしたりすることもできます。歩いたりドアを開けたりといった私たちの身近な動作も、目に見える動きだけでなく、関節の固さ・柔らかさも適切に調節して、スムーズに実現されています。このような、日常生活やスポーツ、仕事、遊びの場面において、動きの中での関節の固さ・柔らかさを測定し、その調節の仕方を数値的に知ることができると、それらの動作を力学的に解析したり、人に寄り添った自然なアシストをするロボット技術に応用したりすることが可能になります。
運動の邪魔をせずに関節の固さ・柔らかさの働きを測定する
固さや柔らかさは、外から触れて初めて判断できるものです。私たちは、ある物体を触ってみたとき、それが変形すれば柔らかく、形を保つようだと固いと判断します。関節も同様で、働きかけに対して抵抗が小さければ柔らかい、大きければ固いと判断します。この固さ・柔らかさの判断は、数値的には、発生した変位に対してどれだけの反力(抵抗力)を生じさせるか、という視点で表すことができます。つまり、最もシンプルなやり方ですと、バネの伸びと反力の関係を表すフックの法則の比例定数で、固い・柔らかいを測ることができます。したがって、人の運動中の関節の固さを測るためには、変位(位置や角度)を測るセンサと、力を測るセンサ、そして関節に変位を発生させるために外から働きかける装置(アクチュエータ)が必要になります。
実際に身体が動いている状況で、その運動を邪魔せず、かつ固さを正しく求められるくらいの働きかけを両立させるというのはなかなか難しく、世界中で様々なシステムが検討されています。私はこの課題に対して、飛び移り座屈という現象を利用して働きかけを行う方法を開発しました。飛び移り座屈とは、身近な例ですと、下敷きを押し縮めて曲げたときにベコンベコンと速い動きをさせることができる、あの現象のことをいいます。この速い動き(=瞬発力)を重さ200g程度の装置で作り出し、ワイヤを介して運動中の人の関節に働きかけます(図1)。こうして発生した関節の変位や反力を計測して、運動中に変化する固さを数値的に得ていきます。
これまでの研究で、私たちの手法は瞬発力で働きかけを行うという特殊性から、力を測るセンサが不要であることがわかりました。これによりシステムの大幅な簡略化が実現され、世界的に見てもあまり例の無い、道具を扱う実作業中の手首の固さの推移を調べられるようになりました。
 図1. 弾性体の飛び移り座屈現象を利用した瞬発力発生装置。U字状の金属製の板バネがサーボモータの回転によって上下に素早く動き、ワイヤを介して手首に働きかけを行う。
図1. 弾性体の飛び移り座屈現象を利用した瞬発力発生装置。U字状の金属製の板バネがサーボモータの回転によって上下に素早く動き、ワイヤを介して手首に働きかけを行う。
ジャグリングの動きで試してみた!
せっかくなので何か面白いものを対象に測定したいと思い立ち、自身の趣味でもあるジャグリングを題材とすることにしました。ジャグリングは、実はロボット工学にまつわる課題を豊富に含んでいて、古くからこの分野で取り上げられているトピックです。本学の研究活動促進方策の1つ「Research Booster制度」の支援を受けながら、デビルスティックと呼ばれる、2本の操作用スティックを介して1本のメインスティックを操る技能について、目に見える身体の動き、筋肉の活動状況、そして私たち独自の手首の柔らかさの使い方という3つの視点から解析に取り組みます(図2)。セミプロで活動されていた方にお願いをして、モーションキャプチャと表面筋電位センサ、瞬発力発生装置を装着してもらい、アイドリングという基本わざを実現している上肢の運動を計測させていただきました。そして、計測データを解析し、わざの流れの中で適切に調節される手首の柔らかさを実際に数値化することができました。
柔らかさが数値として得られると、運動方程式にしたがってコンピュータシミュレーションを行うことができます。条件を様々に変えてスティックを操る上肢の運動をシミュレートし、手首の柔らかさの役割を調べてみました。シミュレーション結果から、手首の柔らかさが適切に調節されると、上腕二頭筋の作用で前腕部に生じる運動の伝わり方が整えられ、わざを続けるための操作スティックの運動軌道の概形が作り出されることがわかりました。手首を単に柔らかくするだけ、固くするだけの条件設定ではこのような運動軌道は生成されなかったため、上腕の筋活動と手首の柔らかさ調節の連携が鍵であるといえます。さらに、この手首の柔らかさは同時に、操作スティックをバネのように振る舞わせ、メインスティックの運動を上手に受け止めて無駄なく跳ね返す働きをしていることもわかりました。手首の柔らかさを数値で測れたことにより、動きの作り方や道具の操り方といったわざを実現する技能について、ロボット工学の知見を用いて解析することができました。
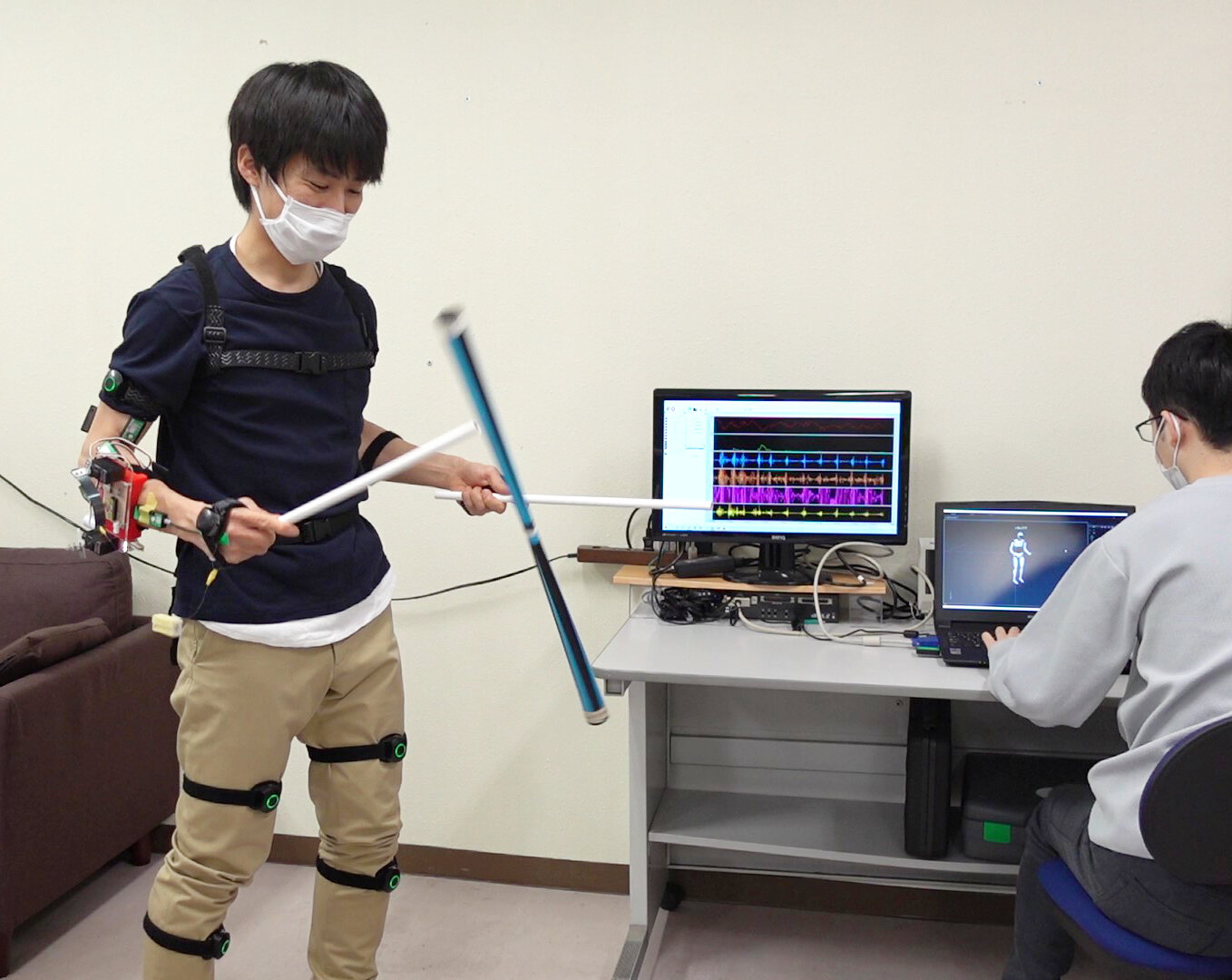 図2. デビルスティックのわざを実現する運動の計測実験。基本わざのアイドリングでは、両手に持った白い操作スティックで中央の青いメインスティックを交互に叩き、宙に浮いているかのように振る舞わせる
図2. デビルスティックのわざを実現する運動の計測実験。基本わざのアイドリングでは、両手に持った白い操作スティックで中央の青いメインスティックを交互に叩き、宙に浮いているかのように振る舞わせる
アニメや映画の中の存在だったロボットですが、人に着用する、人と共に過ごすなど、様々な形で身近になってきています。そうした人とロボットが一緒に過ごす社会において、私たちの進めている関節の柔らかさを測る技術が、人の身体の使い方への理解と、それを活かした自然な動作支援やリハビリテーション、スキルコーチングをしてくれるロボットシステムの実現につながればと考えています。
※本研究活動の一部は、研究推進経費による「令和2年度 Research Booster」を受けて実施されました。
関連リンク
 ときには何十年、何百年後の未来を展望しながら学問、真理を追究する研究者たち。茨城大学にもそんな魅力的な研究者がたくさんいます。
ときには何十年、何百年後の未来を展望しながら学問、真理を追究する研究者たち。茨城大学にもそんな魅力的な研究者がたくさんいます。
研究者自身による寄稿や、インタビューをもとにしたストーリーをお楽しみください。
【企画:茨城大学研究・産学官連携機構(iRIC)&広報室】


{kind=link}